深入浅出 GPU 执行模型:打破 CPU 直觉的并发魔法与 UE 实战
在编写 Shader 或进行 GPU 编程时,我们常常听到”百万线程并发”这样的说法。然而,如果我们带着写 CPU 代码的直觉去理解 GPU,往往会掉入性能优化的陷阱。
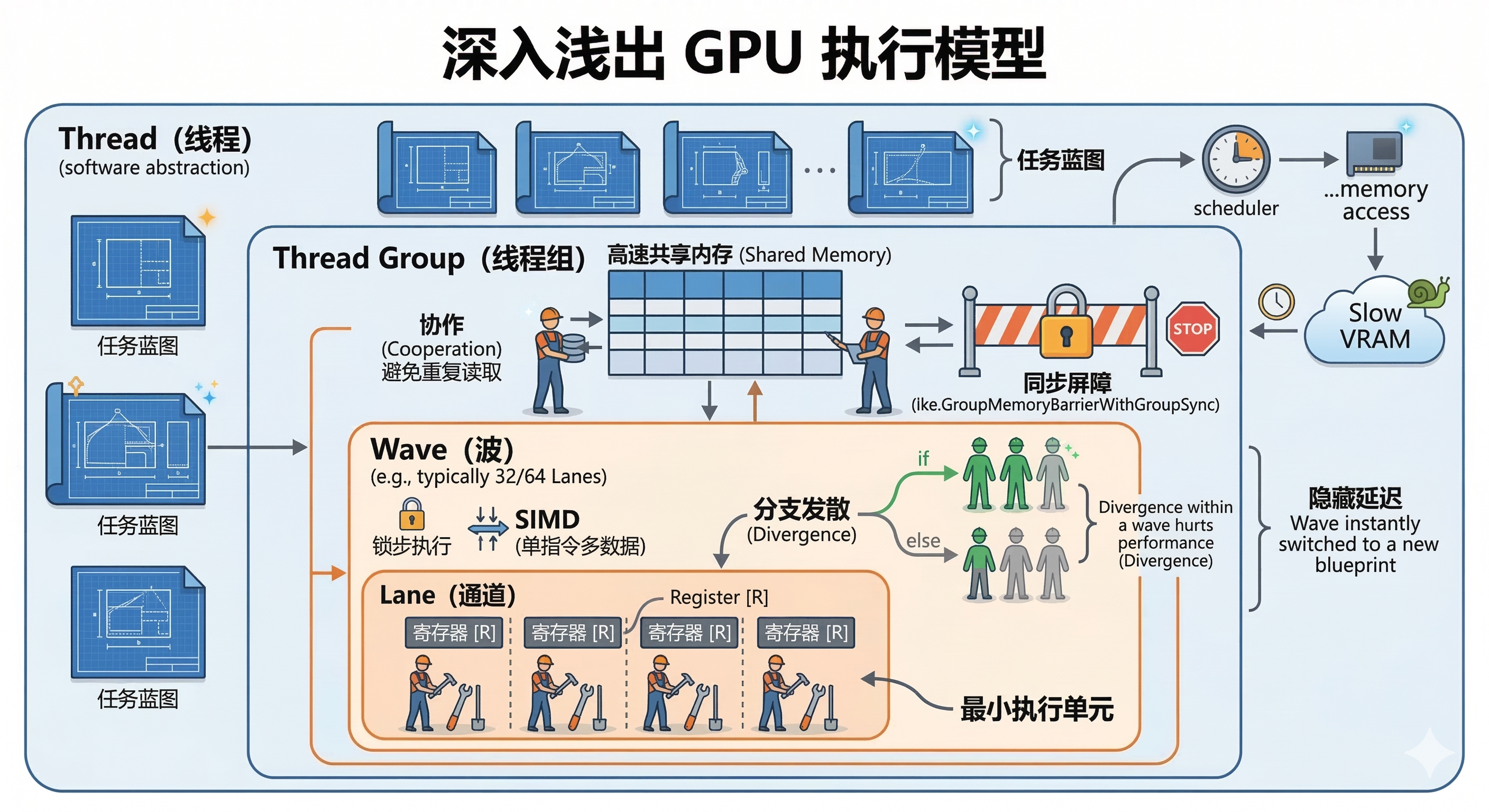
在 GPU 的世界里,“线程 (Thread)“并非传统意义上的物理核心。今天,我们就像拆解俄罗斯套娃一样,由内到外、从底层硬件到软件抽象,彻底理清 GPU 的核心架构:Lanes、Waves、Thread Groups 与 Threads,并结合一段真实的 Unreal Engine 计算着色器 (Compute Shader) 代码进行逐行解剖。
1. 最底层的打工人:Lane (通道)
如果我们把 GPU 渲染比作一个巨大的建筑工地,那么 Lane (通道) 就是真正在前线干活的”建筑工人”,它是 GPU 中最小的执行单元。
- 专属工作台 (Registers): 每个 Lane 都拥有自己极快、但容量极小的专属存储空间——寄存器。
- 性能痛点 (Register Pressure): 如果我们在代码中声明了过多的局部变量,就会导致寄存器空间被塞满。为了防止数据溢出到极其缓慢的显存 (VRAM) 中,GPU 只能被迫减少同时开工的工人数量。这会严重降低硬件的占用率 (Occupancy),导致算力闲置。
💡 核心法则: 保护好最底层的片上内存,精简局部变量,是写好 GPU 算法的第一步。
2. 锁步同行的仪仗队:Wave (波)
单个的 Lane 并不是自由散漫的。硬件会将它们捆绑成一个个小分队,通常是 32 或 64 个 Lane 组成一个 Wave (波)。
Wave 的核心特征是 SIMD (单指令多数据) 和 锁步执行 (Lockstep)。 想象一支 32 人的仪仗队,他们不仅要同时迈步,而且必须执行完全相同的动作。他们拿着同一份指令,只是在处理各自寄存器里的不同数据。
分支发散 (Divergence) 的代价
因为 Wave 必须”锁步执行”,当代码中出现 if-else 分支时,危机就出现了:
- 假设 Wave 中一半的 Lane 满足
if条件,另一半满足else。 - GPU 无法让它们同时做不同的动作,只能轮流执行。
- 执行
if时,原本走else的 Lane 会被强制休眠 (Masking),原地发呆;反之亦然。
⚠️ 性能警告: Wave 内部的分支发散会严重破坏并发效率。最极端的情况下,如果 32 个 Lane 走向 32 个不同分支,耗时将增加 32 倍,算力利用率跌至 1/32。
3. 协作即是效率:Thread Group (线程组)
当我们继续向外看,多个 Wave 会被组织成一个 Thread Group (线程组)。虽然不同 Wave 之间的执行进度可能不同,但同一个组内的兄弟们拥有强大的协作工具。
高速公共桌面:Shared Memory (共享内存)
相比于让每个线程独自去遥远且缓慢的显存 (VRAM) 中拉取数据(容易产生重复搬运),Thread Group 允许大家分工合作,把相邻所需的数据一次性搬入组内专属的 Shared Memory 中。这就好比在工地上搭了一个”高速公共桌面”,大家直接从桌上拿材料,速度产生质的飞跃。
协作生命线:Synchronization (同步屏障)
有协作就必须有规矩。在大家搬完数据,准备利用 Shared Memory 开始”Do fast work”之前,必须调用同步指令(如 GroupMemoryBarrierWithGroupSync)。
它像是一声强制集合哨,要求所有跑得快的线程必须原地等待,直到组内最后一个线程也把数据放好,大家才能共同进入下一步。否则,就会引发灾难性的数据竞争 (Data Race),导致画面错乱。
4. 宏观的软件蓝图:Threads (线程)
最后,我们回到最外层的概念——Threads (线程)。
请记住:GPU 的线程数不是硬件概念,而是软件抽象。 它可以被理解为我们规划好的”百万套任务蓝图”。硬件依靠隐藏延迟 (Latency Hiding) 机制,在不同线程组之间瞬间切换,从而榨干每一滴算力。
5. 实战解析:Unreal Engine .usf 逐行解剖
理论必须落地。在 Unreal Engine 的日常实战中,编写 Compute Shader 是绕不开的硬核技能。让我们通过一段用于生成圆形遮罩 (Mask) 纹理的真实 .usf 代码,来看看上述硬件概念是如何在代码中显现的。
#pragma once
#include "/Engine/Public/Platform.ush"
uint Resolution;
float2 Scale;
float2 Origin;
float2 Location;
float Radius;
RWTexture2D<float> OutTexture;
[numthreads(NUM_THREADS_X, NUM_THREADS_Y, 1)]
void CharacterDot(uint3 DispatchThreadID : SV_DispatchThreadID)
{
// 边界检查
if (DispatchThreadID.x >= Resolution || DispatchThreadID.y >= Resolution)
{
return;
}
// 计算每个像素的大小与坐标
const float TexelSize = 1.0 / float(Resolution);
const float U = (DispatchThreadID.x + 0.5 * TexelSize);
const float V = (DispatchThreadID.y + 0.5 * TexelSize);
// 将纹理坐标转换为实际的世界坐标
const float X = ((U - 0.5) * Scale.x) + Origin.x;
const float Y = ((V - 0.5) * Scale.y) + Origin.y;
// 计算当前像素与指定位置的距离,并生成遮罩值
const float Mask = 1.0 - saturate(length(float2(X, Y) - Location) / Radius);
// 写入输出纹理
OutTexture[DispatchThreadID.xy] = Mask;
}
概念映射与性能分析
-
Thread Group 的划分 (
[numthreads(...)]) 代码开头的[numthreads(NUM_THREADS_X, NUM_THREADS_Y, 1)]直接向 GPU 调度器下达了编组指令。如果宏定义为8x8,那么一个 Thread Group 就包含 64 个线程。这通常是 Wave 大小(32 或 64)的整数倍,以保证硬件完美分配,不留性能空洞。 -
唯一的派工单 (
SV_DispatchThreadID) 每一次CharacterDot的执行,都代表底层的一个 Lane 在工作。DispatchThreadID是保存在这个工人专属寄存器中的全局唯一 3D 坐标。有了它,成千上万并行干活的工人才知道自己究竟该计算哪一个像素。 -
SIMD 与锁步执行 (数学计算部分) CPU 中的大
for循环,在这里变成了纯并行的数学公式(如求U,V,X,Y)。同一个 Wave 里的所有工人,在同一个时钟周期内同时执行相同的代码(单指令),只是代入了各自不同的DispatchThreadID(多数据)。 -
警惕分支发散 (
if边界检查) 代码中的if (DispatchThreadID.x >= Resolution) { return; }是典型的危险地带。假设我们要渲染 100x100 的纹理,按 8x8 编组,必然会有多余的线程(比如 X 轴的第 100~103 号线程)超界并触发return。 注意: 触发return的线程不能立刻下班!因为它们与正常执行的线程被物理绑定在同一个 Wave 中锁步执行。它们只能被屏蔽休眠 (Masked),在原地干等其他兄弟把底下的length和saturate算完,造成这部分算力的局部浪费(Divergence)。 -
显存交互 (
OutTexture[...] = Mask) 最后一步,工人们将结果写回 VRAM 中的纹理。由于这个算法中每个像素的计算都是绝对独立的,不需要”互相抄作业”,因此我们没有使用 Shared Memory 搭建公共桌面,而是直接算完交卷。