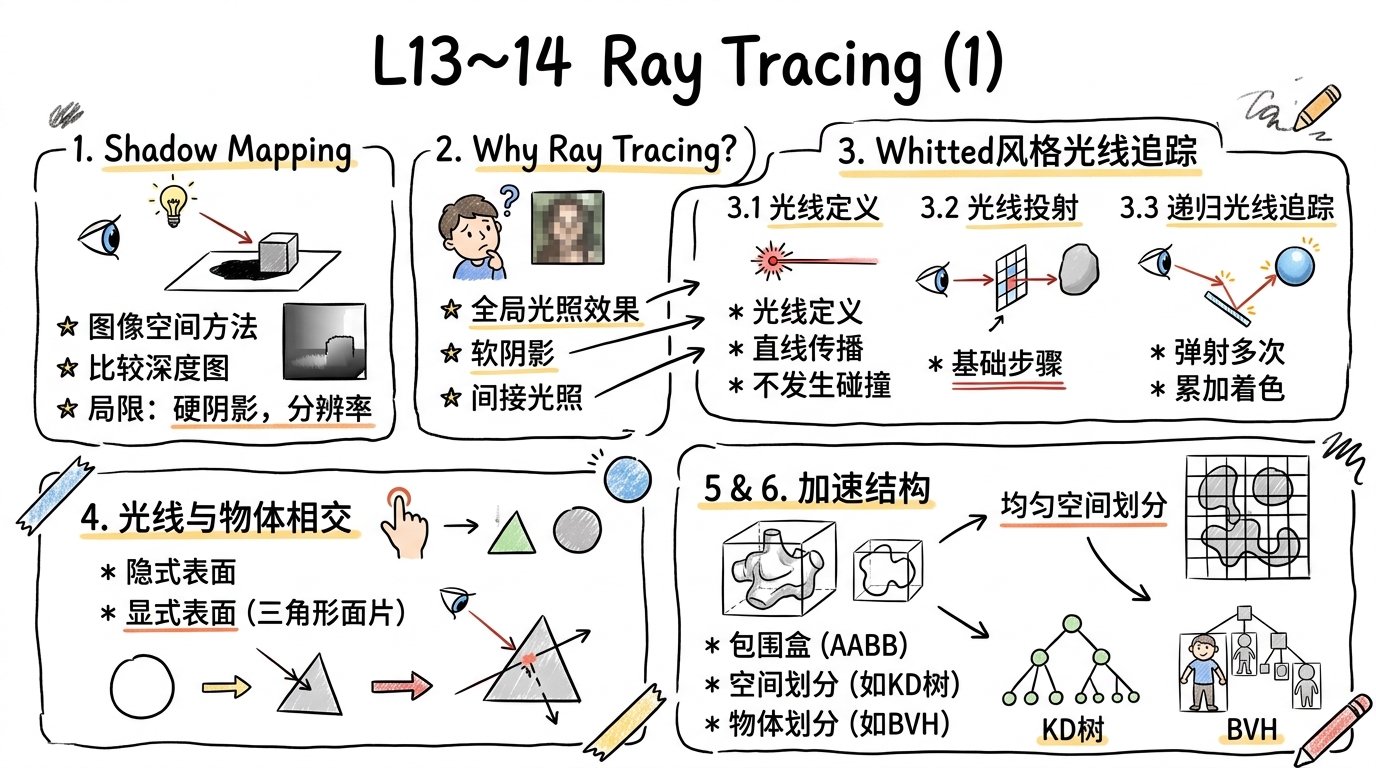
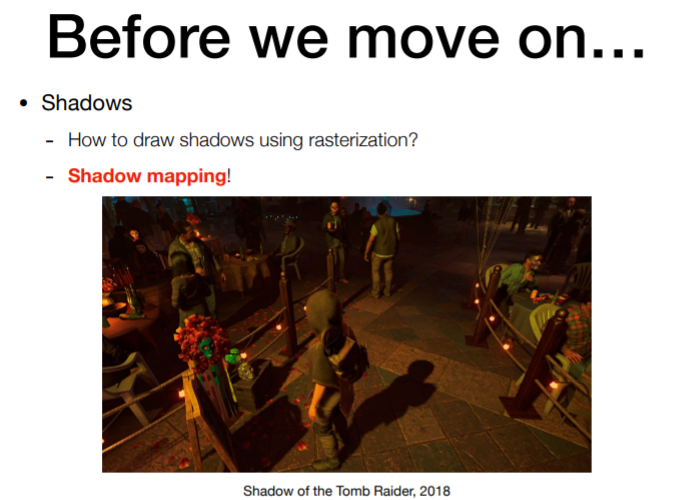
1 引入——Shadow Mapping 阴影贴图
之前提到光栅化的着色,我们知道这是一种局部的现象。着色的过程中,我们只会考虑着色点自己,光源,以及摄像机。我们不考虑其他物体,甚至不考虑物资自身的其他部分对着色点的影响。而事实上是会有遮挡的关系的,是会有阴影的。
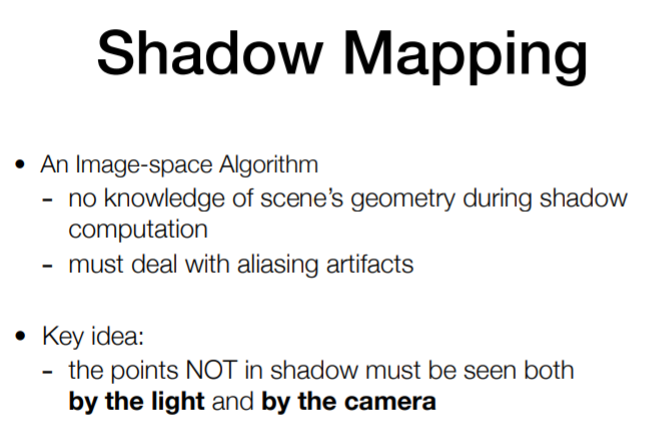
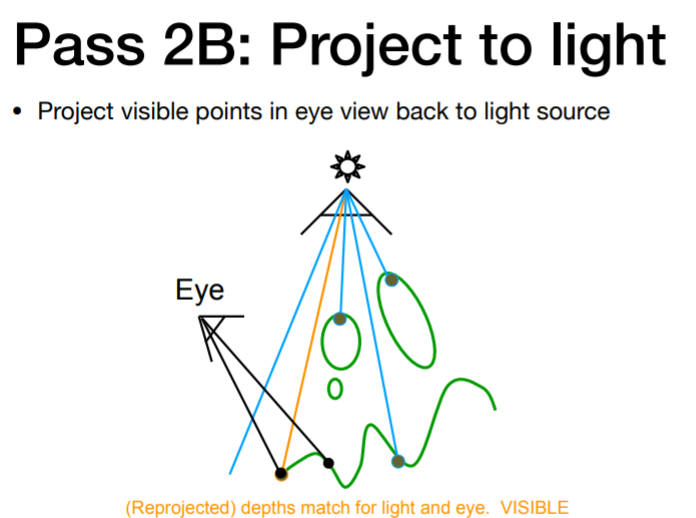
Shadow Mapping这个方法是一种图像空间的做法。关键思想在于——如果有点不在阴影里,那么这个点可以被摄像机和光源都看到。
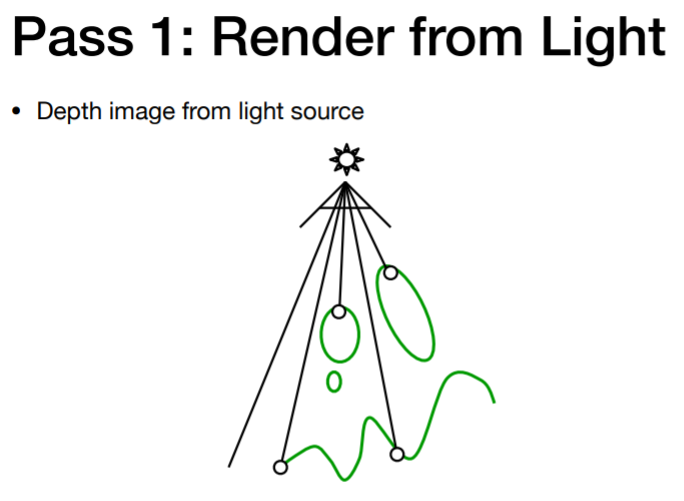
1.1 阴影贴图原理
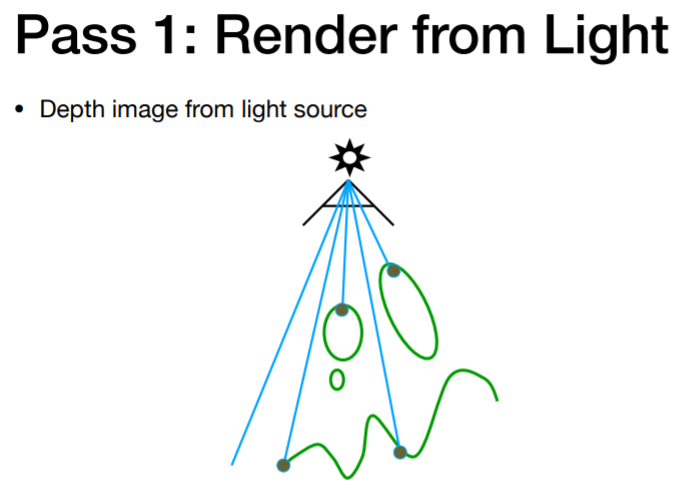
- 从光源看向场景,做一遍光栅化,得到光源能看到什么
- 把这个图的深度记下来
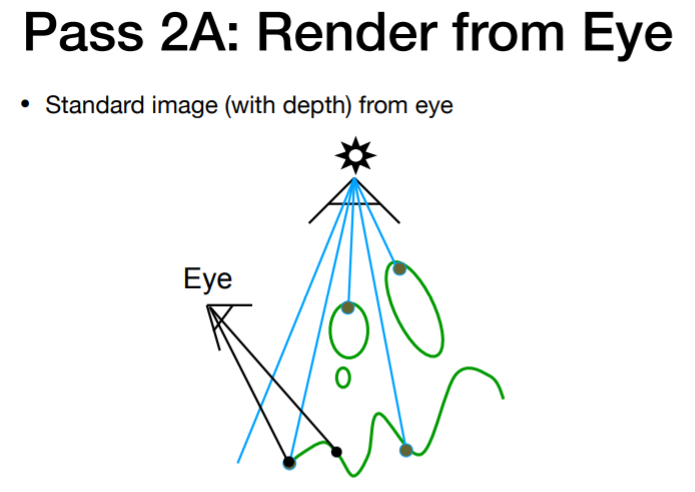
- 从摄像机出发,再次看向这个场景
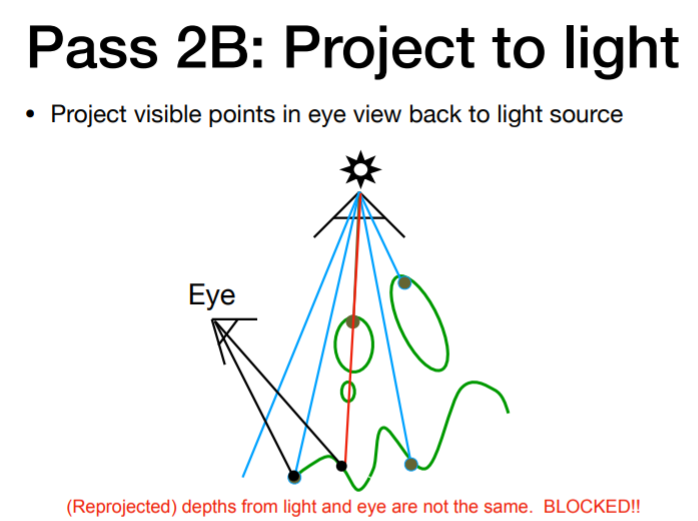
- 把现在看到的点,投影回光源刚才看到的投影平面上进行深度比较
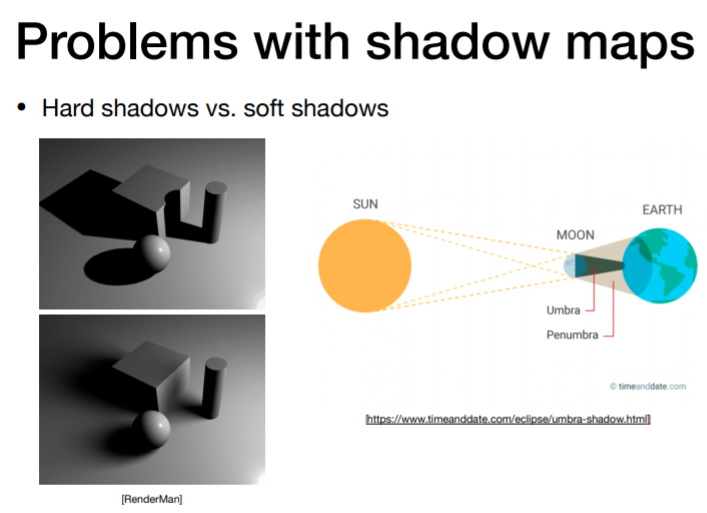
1.2 存在的问题
- 硬阴影(点光源)
- 阴影图的分辨率
- 浮点数的比较
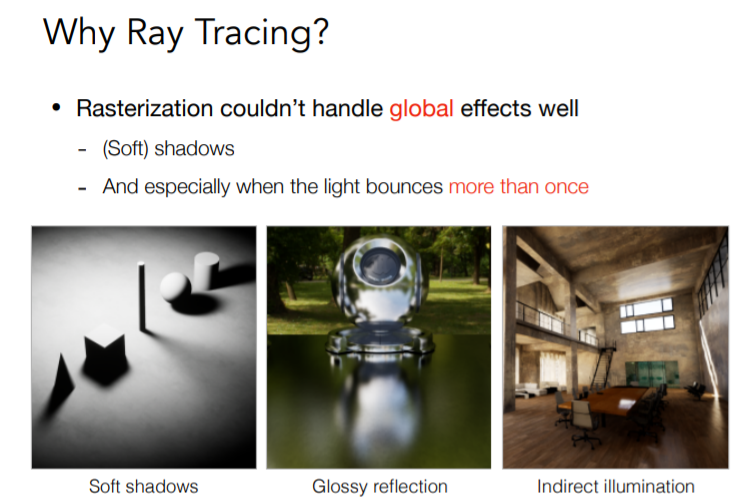
2 Why Ray Tracing?
光栅化不好做全局的效果,比如软阴影,光泽反射,间接光照。
3 基本光线跟踪算法
3.1 光线定义
- 光沿直线传播
- 不发生碰撞
- 是从光源到人眼的(根据光路可逆性,应用时会采取从人眼到光源的方法)
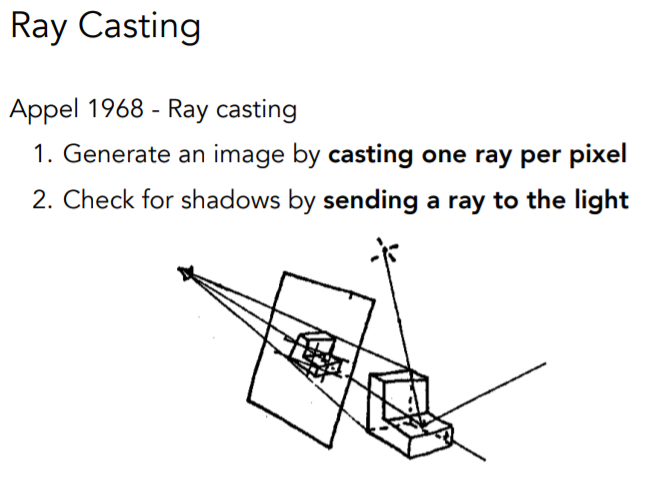
3.2 Ray Casting 光线投射

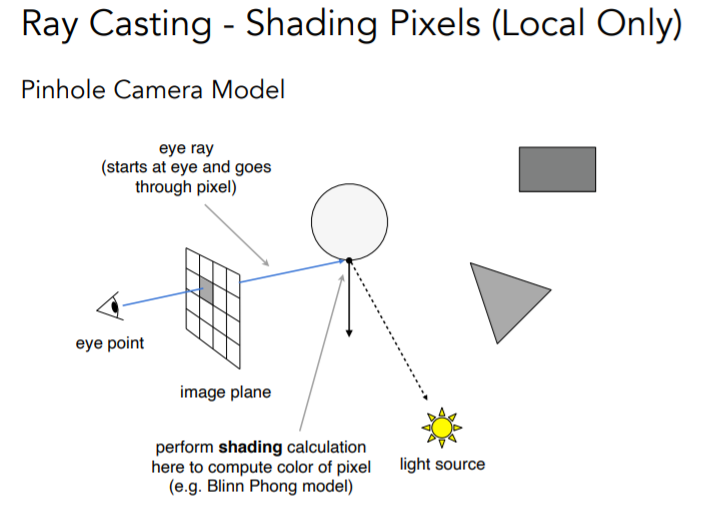
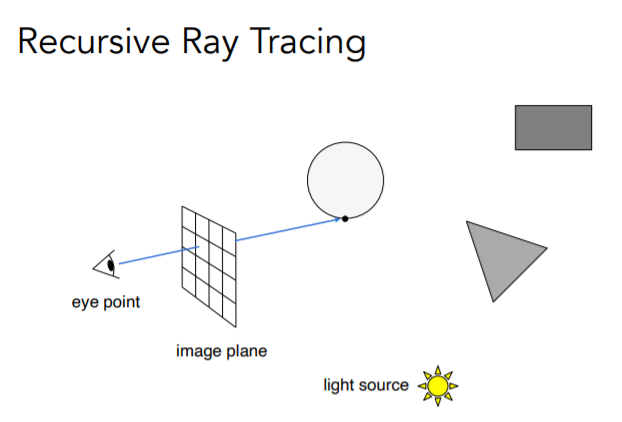
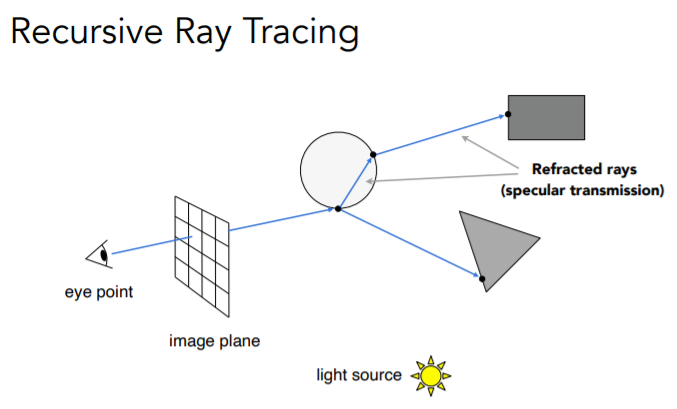
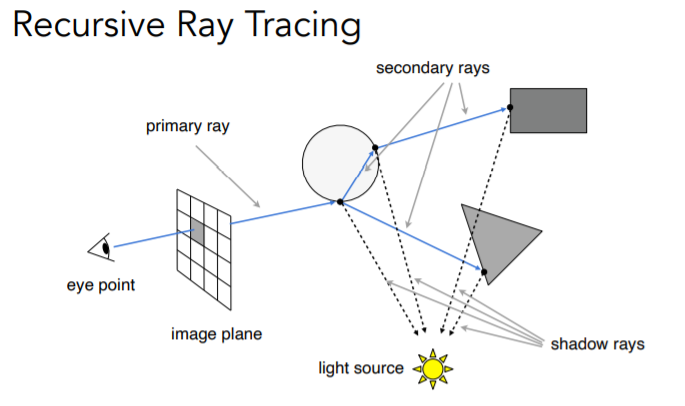
3.3 递归(Whitted风格)光线追踪
光线可以弹射很多次,在每一个弹射点都会去计算着色的值,然后把它们都加回这个像素的值里面去。
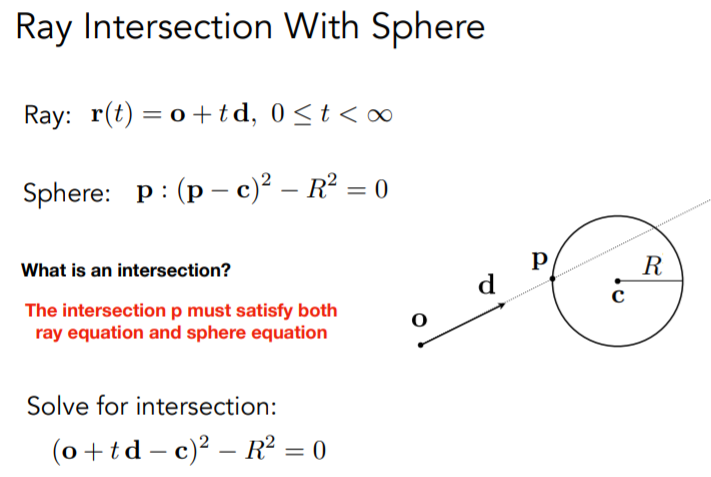
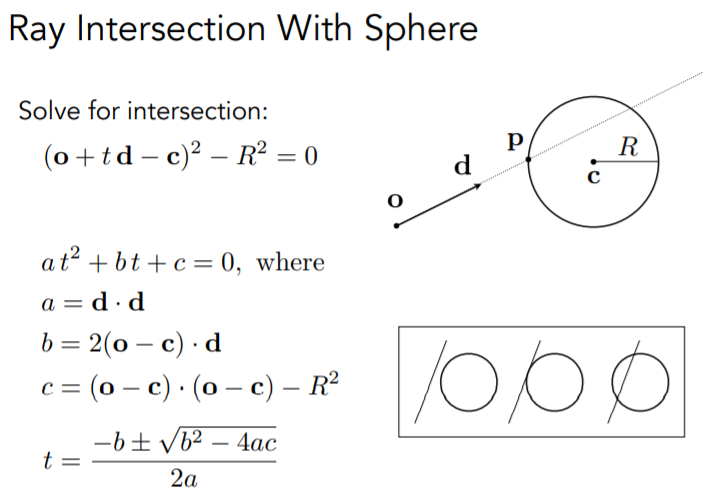
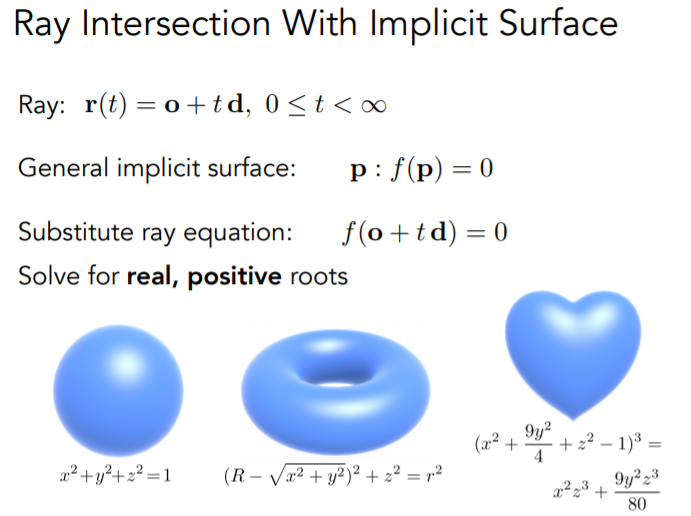
4 光线与物体相交
4.1 光线与隐式表面相交
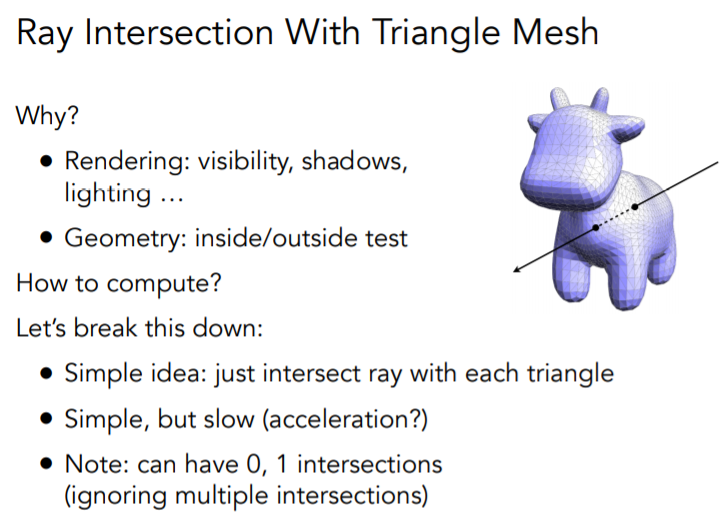
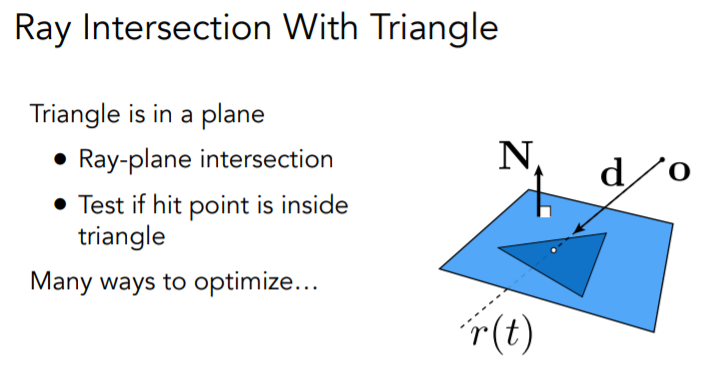
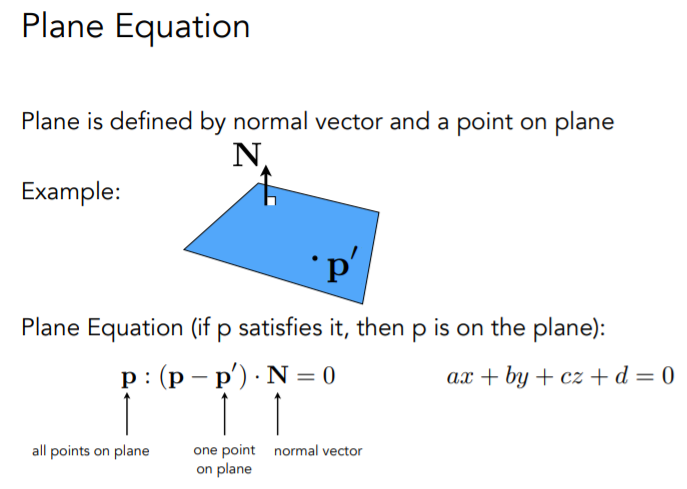
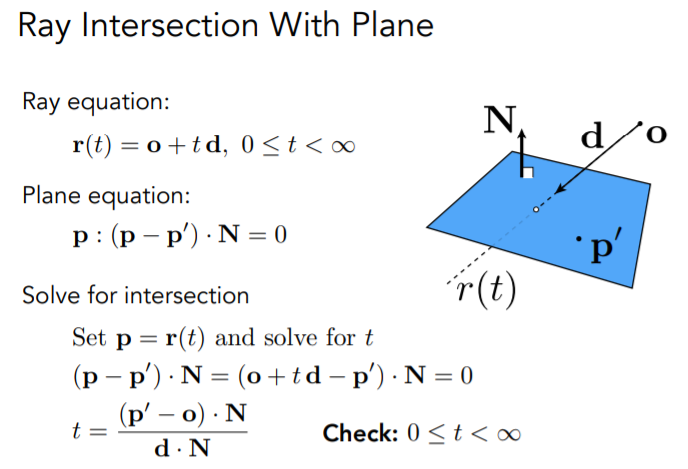
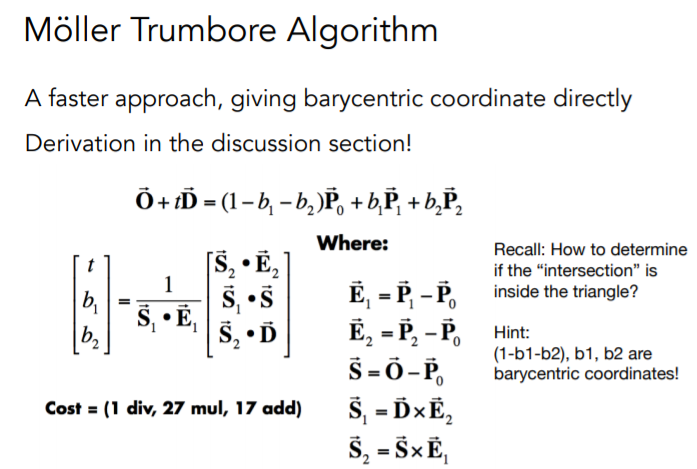
4.2 光线与显式表面求交
三角形肯定在一个平面内,所以问题可以被分成两部分:光线是否和平面有交点;这个交点在不在三角形内部。
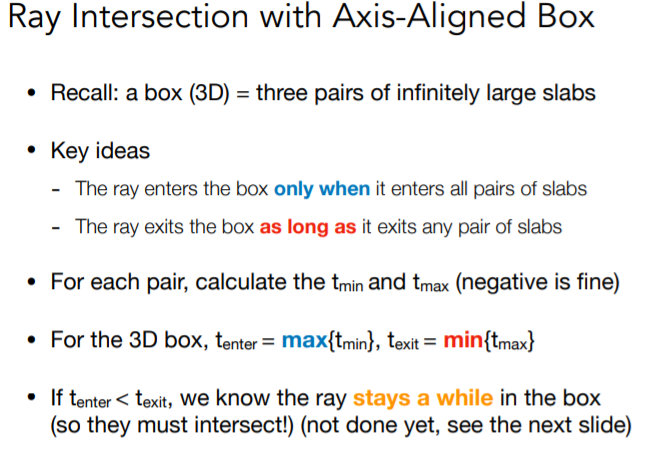
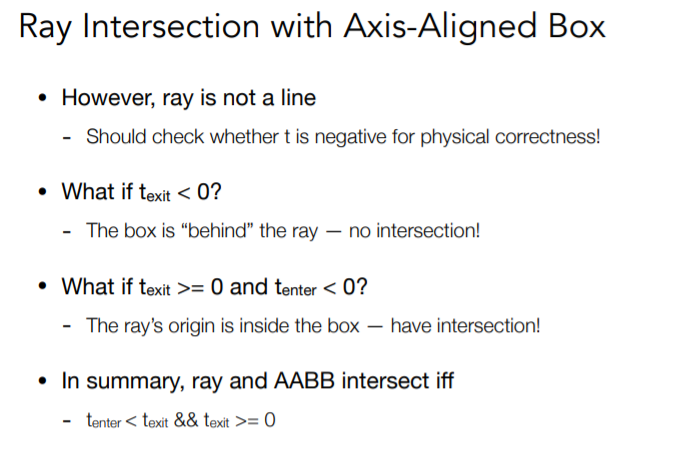
5 轴对齐包围盒(AABB)
包围盒的思想是,将一个复杂的物体,用简单的形状围起来,保证物体一定在这个简单的形状之内。如果光线连包围盒都碰不到,那肯定碰不到包围盒里的物体。
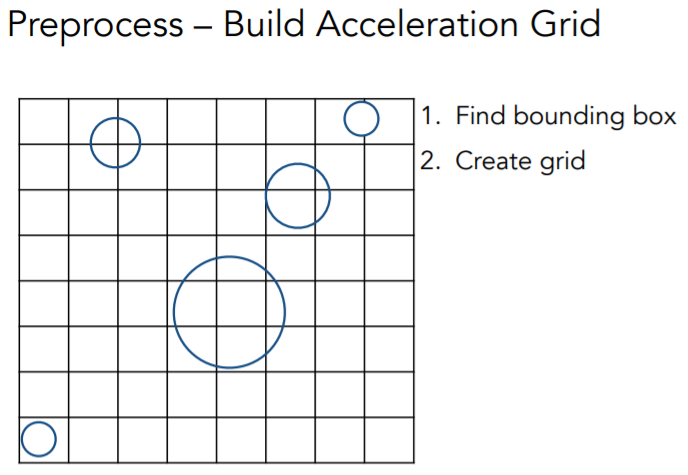
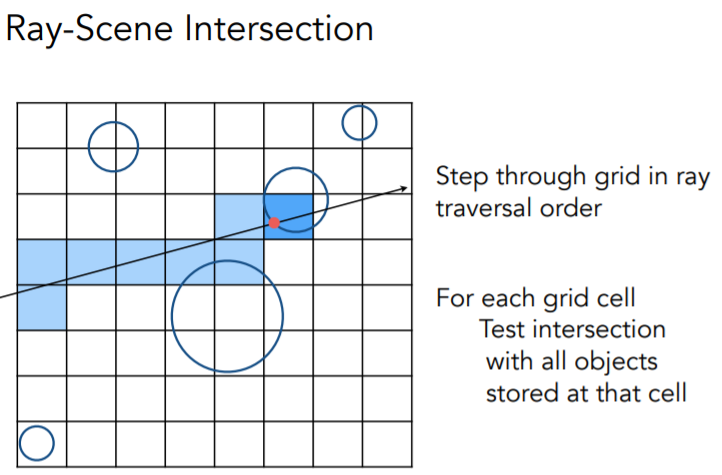
6 加速结构
6.1 均匀空间划分
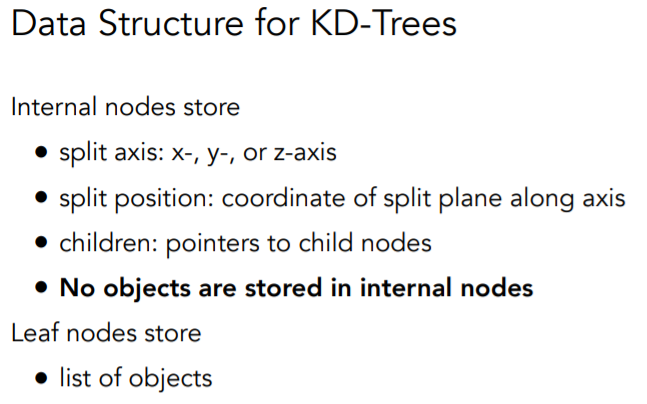
6.2 KD树
KD树每次沿着某一个轴砍开,并且只砍一刀。空间被划分成类似二叉树的结果。
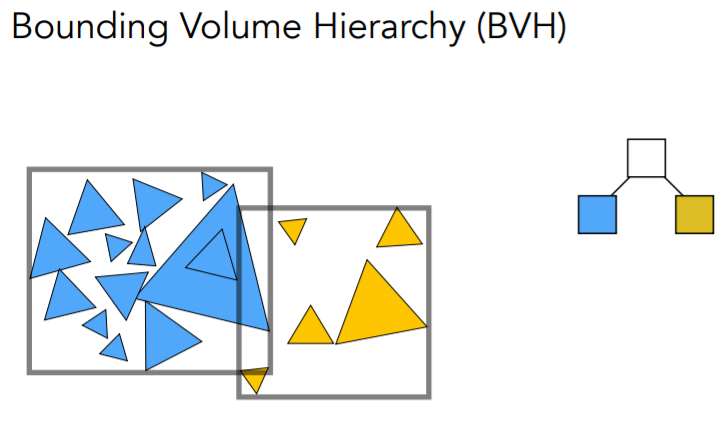
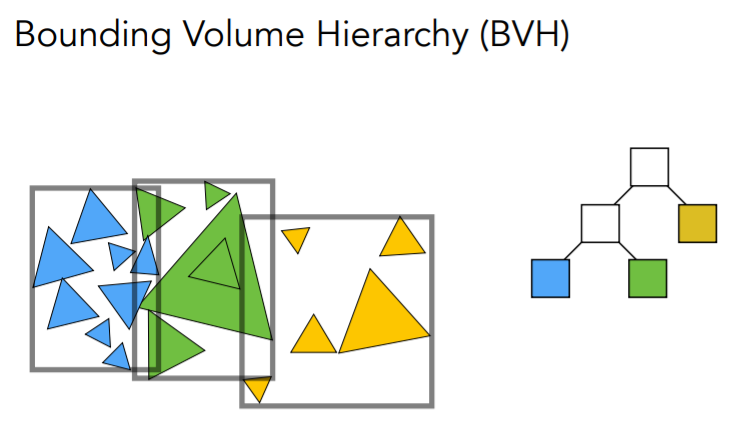
6.3 物体划分 & BVH
BVH不从空间划分,而是从物体开始划分。一个物体只会出现在一个节点里,并且不用算三角形和包围盒求交了。
到这里我们算是讲完了Whitted风格的光线追踪。